ロボットアームの残留振動検出
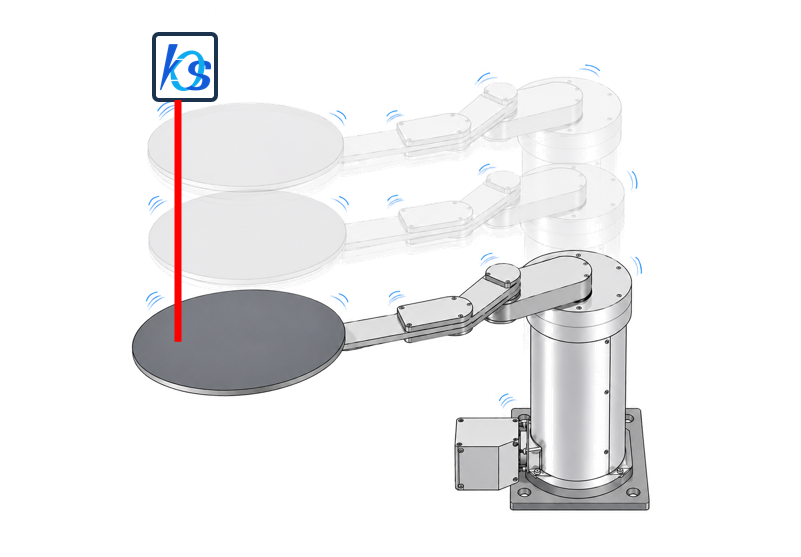
・課題
ロボットアームの高速・高精度化が進む中、停止後に発生する微弱な残留振動は、位置決め精度やタクトタイムに影響を与える要因の一つです。しかし、その振動は極めて小さく、従来の方式では十分な分解能が得られず、微小な変化の正確な検出が困難でした。
・解決
チルトセンサを用いることで、微弱な振動によるわずかな角度変化を検出し、その変化量を数値化することができます。また、チルトセンサは測定距離によって分解能が変化しないため、対象物との距離が変化しても安定した測定が可能です。これらの特長により、従来の方式では検出が困難だった残留振動を可視化し、振動特性を高精度に把握できます。
