レーザ光源の調整用光学センサについて紹介します。
<概要>
近年半導体レーザ(LD)を新たな分野に採用する事例が増えています。
レーザ光源の基本はLDとレンズというシンプルな光学部品で構成されています。
しかし、出射するビームの性能を最適化するためには、LDとレンズの位置を
高精度に調整する必要があります。
当社では、光ピックアップ
(DVDやBDドライブ内で光ディスクの信号を読み書きする光学ユニット)
で培った技術を生かし、様々なレーザ光源の調整に対応した光学センサ
および調整装置の提案をしております。
<レーザ光源採用機器>
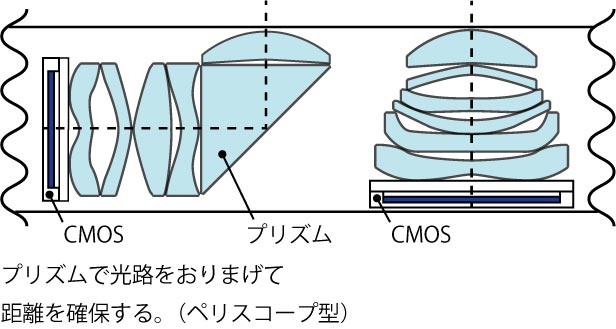
①レーザーレーダ(LiDAR)
レーザービームをスキャンして物体の有無とその物体までの距離を測定する光学ユニットです。
搬送機器や輸送機器等の自動運転には欠くことのできないセンサと言われています。
投光部にレーザ光源を搭載しており、輸送機器では最長100m以上の距離で投光ビームを
最適化する必要があります。この為レーザ光源は高精度に調整が必要となります。
②レーザーライト(レーザーヘッドライト)
LD光の集光点に蛍光材料を配置し、その点を発光元とした投光器。
輸送機器などより遠くまで高輝度の光を照射したい用途に有効と言われています。
発光元を小さくすることでより遠方まで高輝度で照明できるためLD光を効率良く集光
させる必要があります。この分野でもLD光源を高精度に調整する需要があります。
<LDとレンズ>
LDは強度分布を持った発散光を出力します。
この光源とレンズの位置関係でレーザ光源から出射されるLDの状態が変化します。
ここではそれぞれのケースでどのような状況が発生するか解説します。
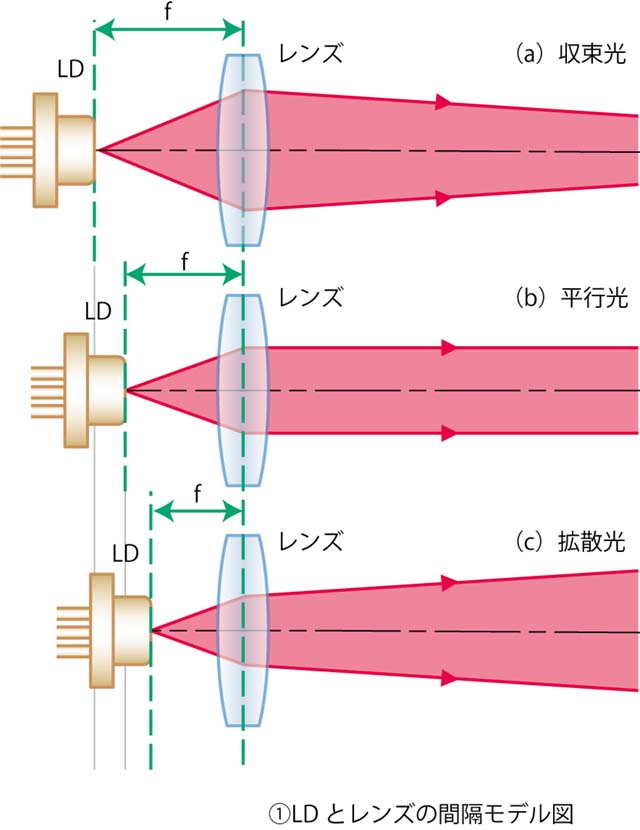
①LDとレンズの間隔(Z位置またはフォーカス)
LDとレンズの間隔が変わると出射されるLD光は収束光、平行光、及び拡散光となります。
それぞれの状況を以下に示します。

(a)はレンズの焦点距離よりLDが遠くにある場合。
この場合、レーザ光源から出射される光は収束光になります。
(b)はレンズの焦点距離にLDがある場合。
この場合、レーザ光源から出射される光は平行光となります。
(c)はレンズの焦点距離よりLDが近くにある場合。
この場合、レーザ光源から出射される光は拡散光となります。
当社では測定光が収束光、平行光、拡散光のどの状態にあるのかを検出可能な光学センサの
ご提案が可能です。
②LDとレンズの位置(X,Y位置)
レンズの光軸上からLDがずれた位置に来ると出射される光はレンズの光軸に対し
傾いて出射されます。(下記参照)

実際にはレーザ光源の筐体(の一部)が基準面となっている場合が多く、
その基準面に対する光の角度を調整します。
当社ではレーザ光源の光軸測定を行う光学センサの提案が可能です。
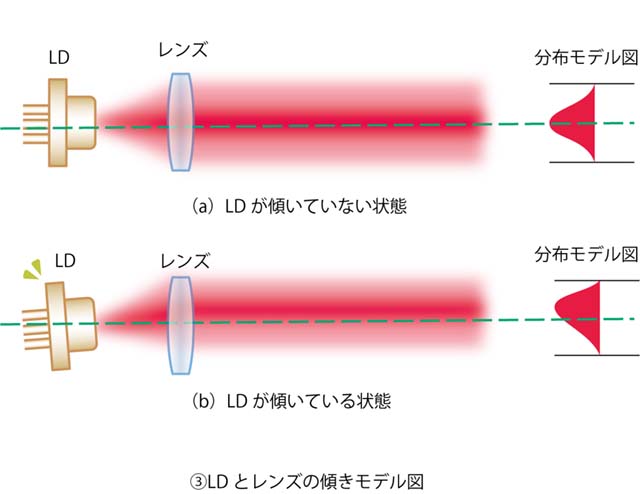
③LDとレンズの傾き(θX,θY)
冒頭に説明しましたが、LDは拡散光であり強度分布があります。
理想的なLDは最大強度の位置とレンズの中心が一致している状態です。
この状態に調整するとレーザ光源は最大効率で光を出射できます。
最近のレーザ光源搭載機器は光強度(パワー)を要求されることが多く、
傾き調整を行う事案が増えています。
当社ではレーザ光源から出射される光の強度分布を測定し、
LDの傾き調整を行う光学センサを提案が可能です。
LDの傾きと光の関係を以下に示します。

(b)のケースですが、LDが傾くとレンズの中心からずれた位置を最大強度部分が通過する為
レーザ光の中心と最大強度がずれてしまいます。
(a)の様にLDの傾きを調整することでレンズ中心と強度中心を合わせることが可能です。
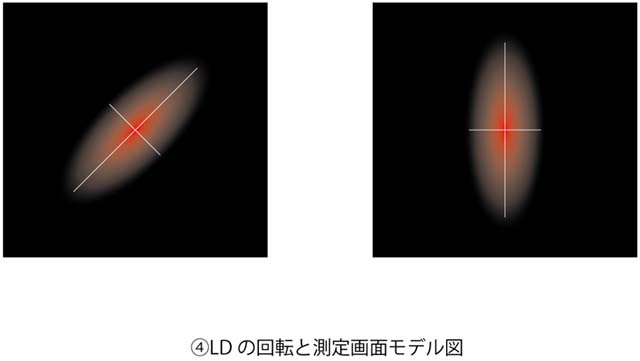
④LDの回転(θZ)
高出力のLDは発光面積を大きくしてパワーを大きくしています。
この場合発光点は点ではなく、楕円となります。
楕円の状態はレンズを通しても同様な特性が保持される為、
LDの回転調整を行う場合もあります。

当社では光の強度分布のデータから回転方向の測定、調整を行うことが出来る
センサの提案が可能です。
当社はレーザ光源調整に関連する数多くの技術、実績があり、
お客様が望まれる仕様に合わせたセンサのご提案が可能です。
レーザ光源の調整、測定でお困りのことがありましたらフォームからご相談ください。