0032_超小型チルトセンサ(オートコリメータ)_使用事例_平行度の測定
非接触で角度測定が可能な超小型チルトセンサ(オートコリメータ)は、複数台を使用することで
様々なアプリケーションに対応することが可能です。
例えば、超小型チルトセンサ(オートコリメータ)を対向する位置関係に設置し、
測定対象物の2面の角度を測定することで、瞬時に対象物の平行度を確認することができます。
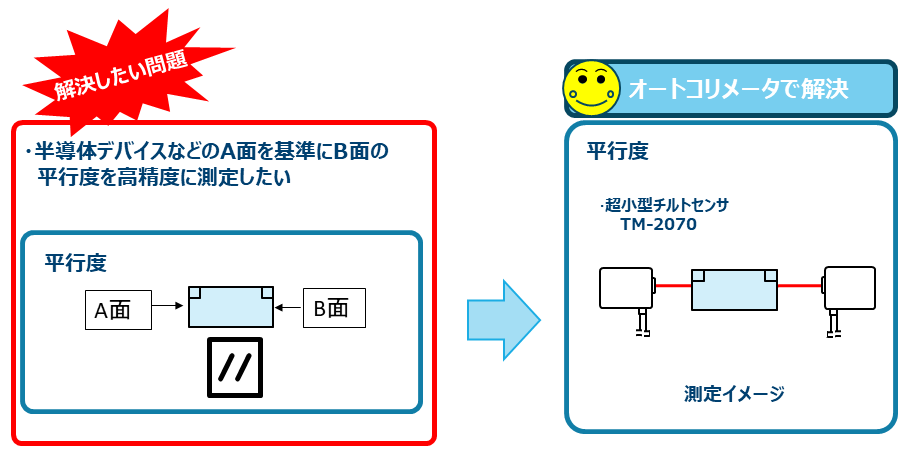
非接触高精度平行度測定などのテーマをお持ちのお客様がいらっしゃいましたら下記よりお問合わせください。
非接触で角度測定が可能な超小型チルトセンサ(オートコリメータ)は、複数台を使用することで
様々なアプリケーションに対応することが可能です。
例えば、超小型チルトセンサ(オートコリメータ)を対向する位置関係に設置し、
測定対象物の2面の角度を測定することで、瞬時に対象物の平行度を確認することができます。
非接触高精度平行度測定などのテーマをお持ちのお客様がいらっしゃいましたら下記よりお問合わせください。
非接触で角度測定が可能な超小型チルトセンサ(オートコリメータ)は、複数台を組み合わせて
使用することで様々なアプリケーションに対応することが可能です。
例えば、超小型チルトセンサ(オートコリメータ)を直行する位置関係に設置し、
測定対象物の2面の角度を測定することで、瞬時に対象物の直角度を確認することができます。
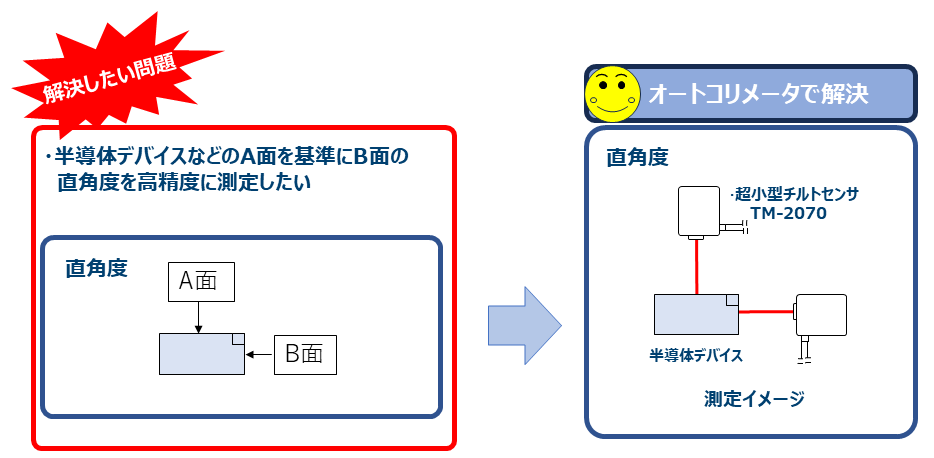
非接触高精度直角度測定でお困りごとがございましたら下記よりお問合わせお待ちしております。
本光学センサは対象物の位置(X-Y)を非接触、高精度に測定することが可能です。
X-Y方向の移動機構の測定、検査に最適な光学センサです。
レンズシフトやセンサーシフト方式の手ぶれ補正機能付きアクチュエータ検査にご採用いただいています。
仕様は下記をご参照ください。
※なお仕様および製品名などは変更になる場合がございます。

製品のお問合せなどございましたら、営業担当または下記よりお問い合わせください。
超小型チルトセンサ用の処理ユニットGP-2000とPCを接続し、付属の専用ソフトウェア「GP 2000 Paramset」を用いることで、
スポット像の確認ができるようになりました。
実際のスポット像を確認することで、正常な状態で測定が行えているか確認する事が出来ます。
この機能はGP-2000のソフトウェアVer1.01以上でサポートされています。
詳しくはお問い合わせください。
”社長ブログ”で2015年に”軸外収差測定”2019年に”軸外収差測定-2”として
登場してますが、この度測定状況をご覧いただける状態まで開発が進みました
ので、改めてご紹介いたします。
<概要>
・本装置はレンズの光軸上及び光軸外の波面収差測定が可能です。
<特徴>
・合焦レンズの光軸上及び光軸外の波面収差を全自動で測定することが可能です。
・波面収差測定は単位を持っており、レンズの定量的な測定評価が可能です。
・MTF測定機と比較してレンズに対する多くの情報を得ることができます。
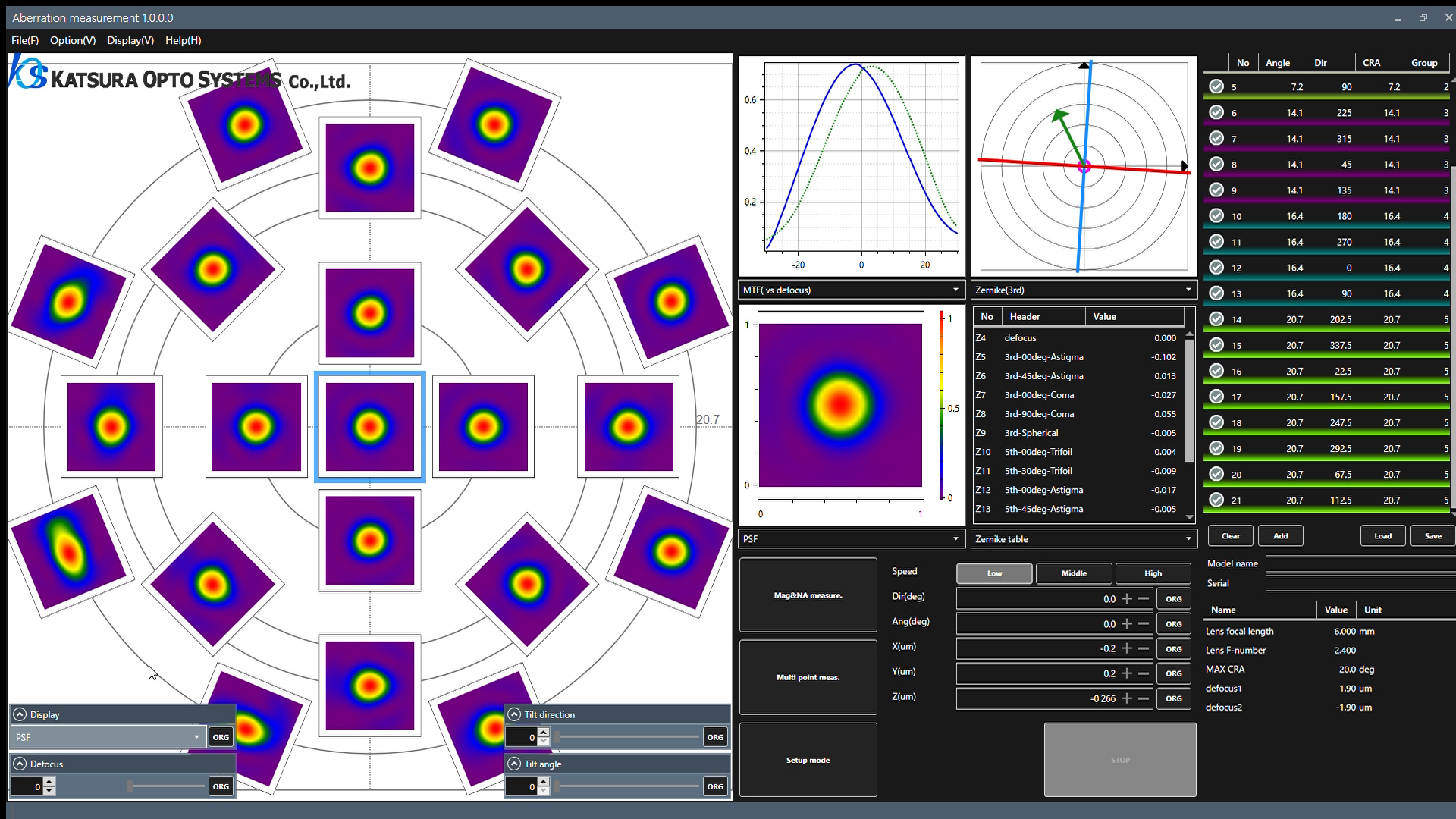
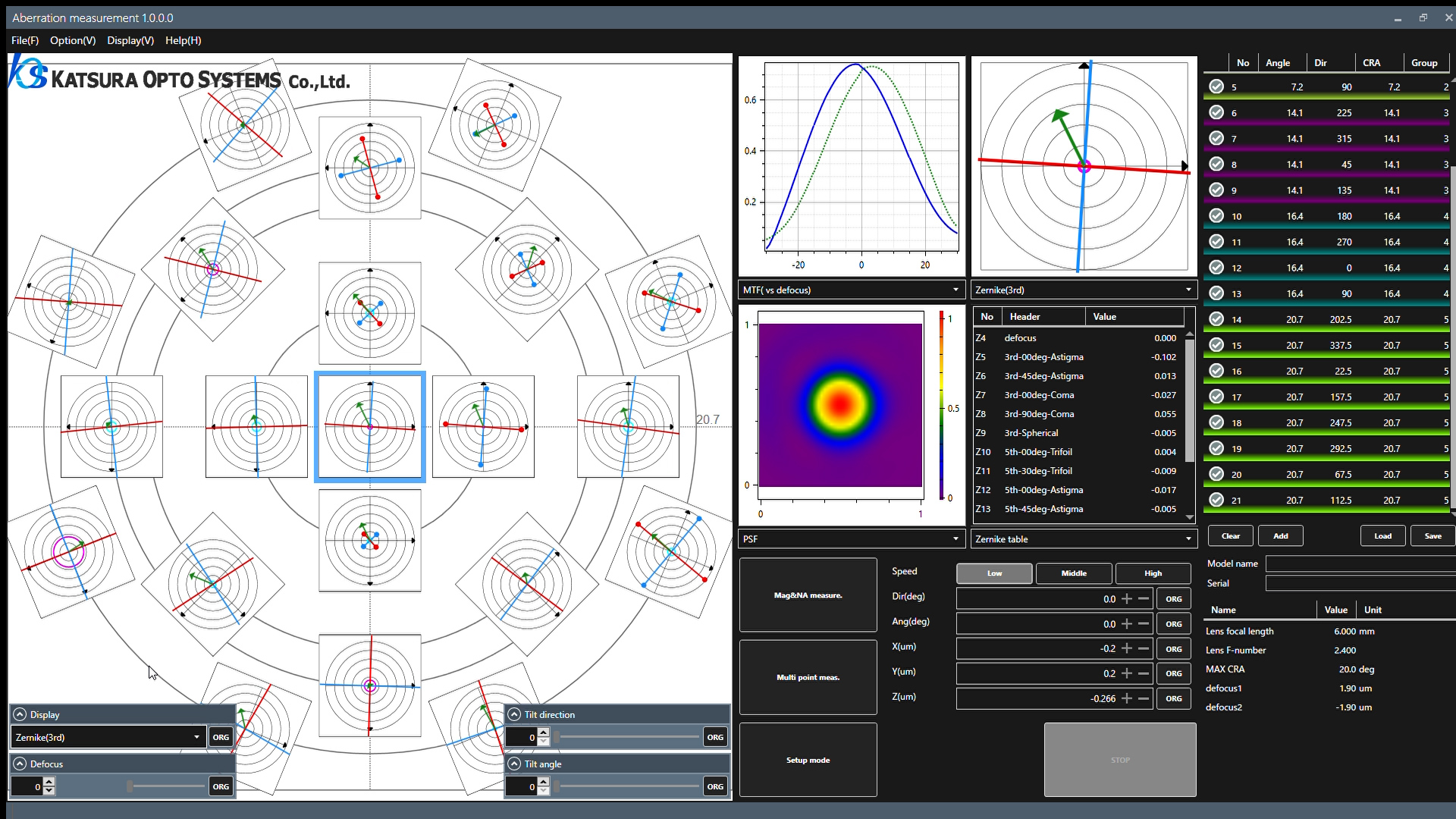
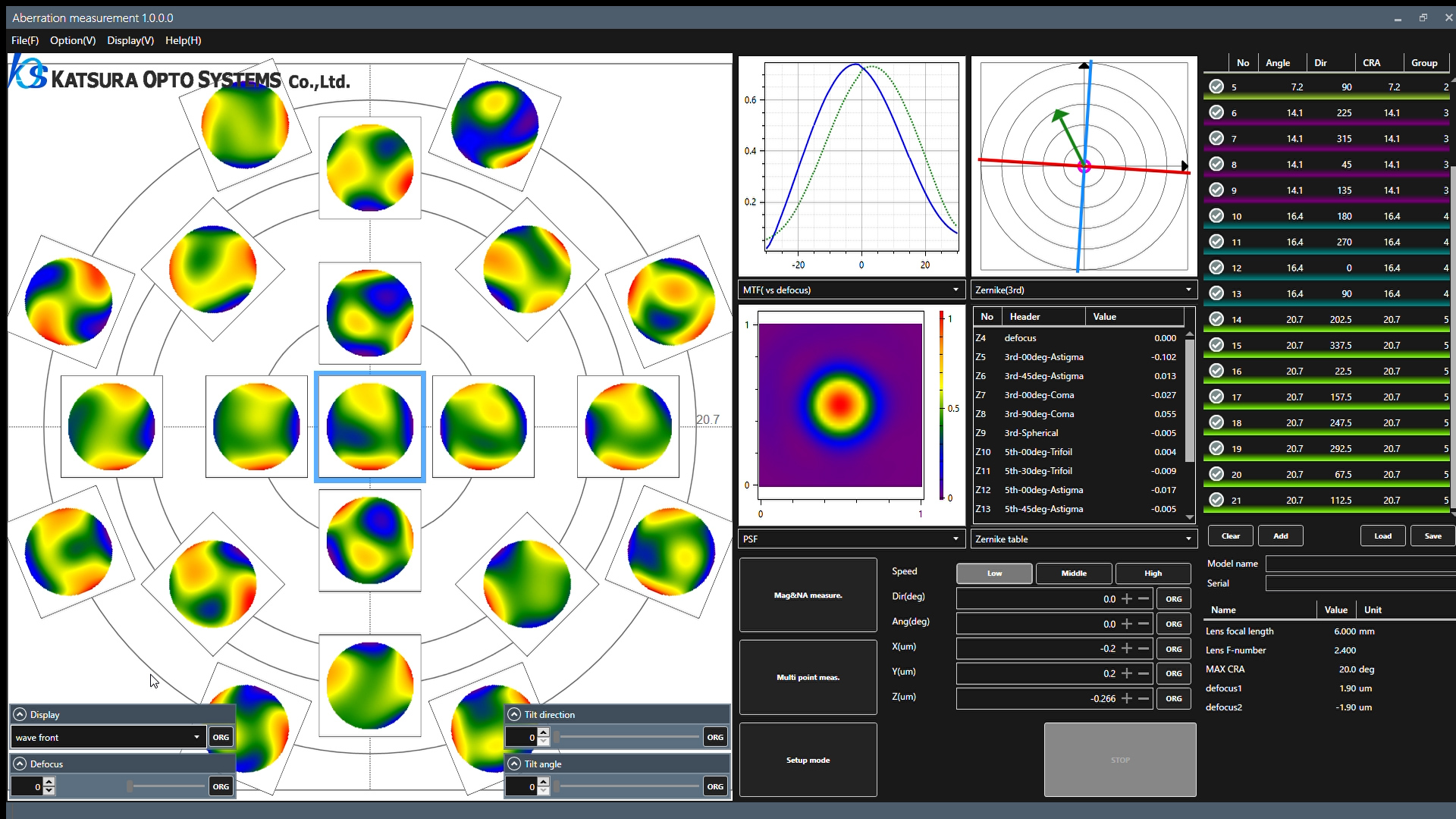

・レンズ設計データの親和性が高く、設計、製造等の改善が可能です。
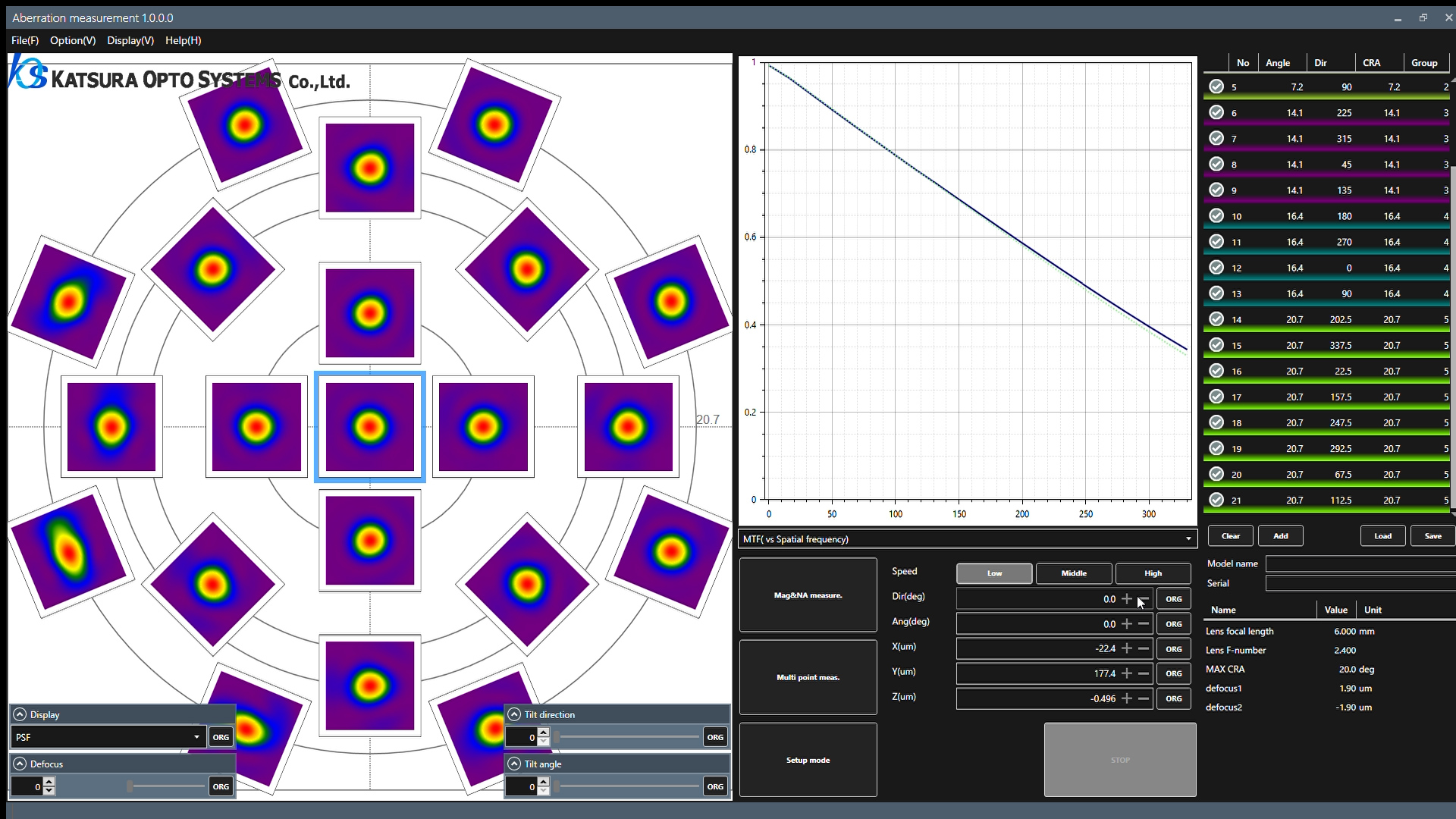
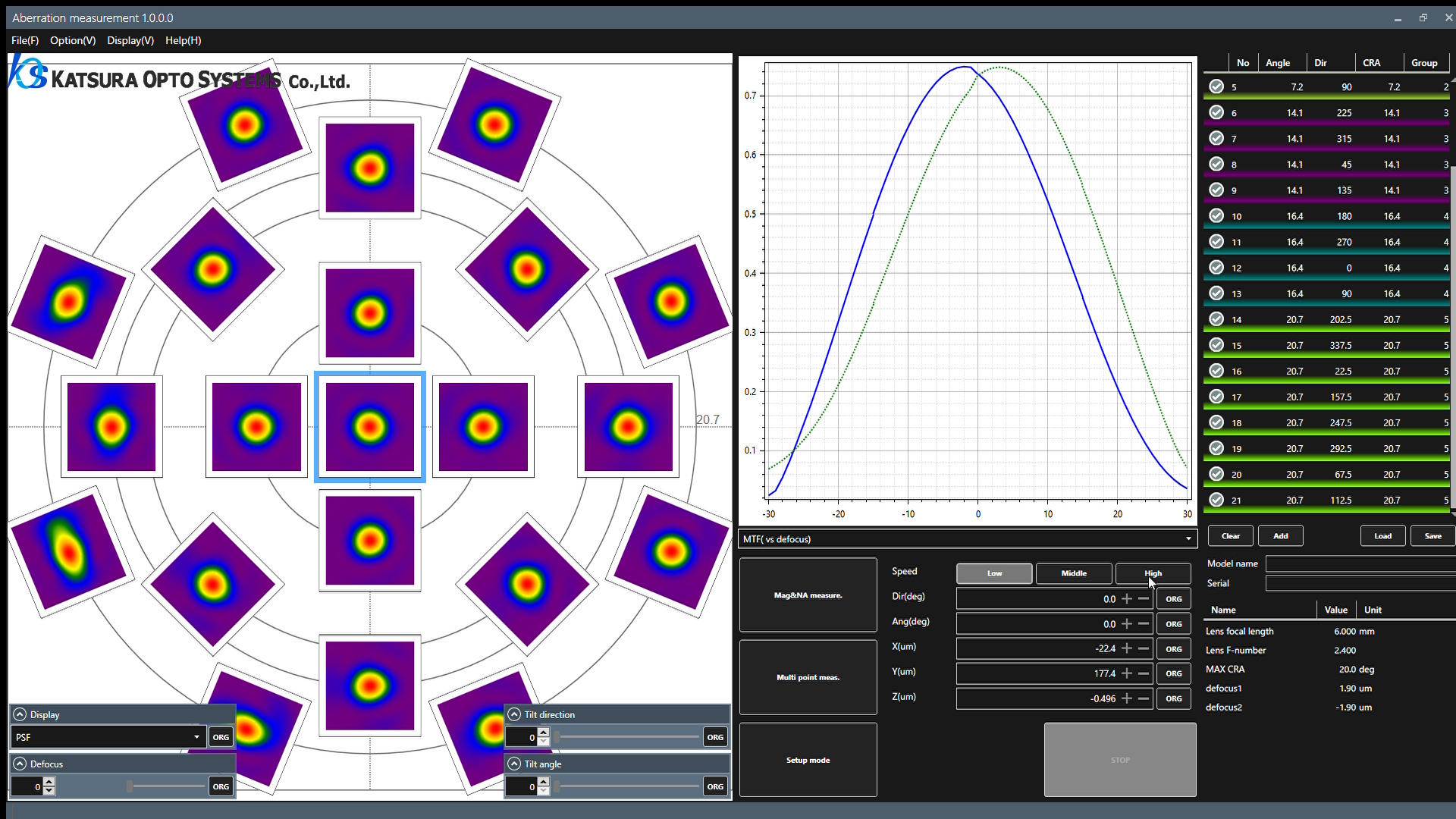
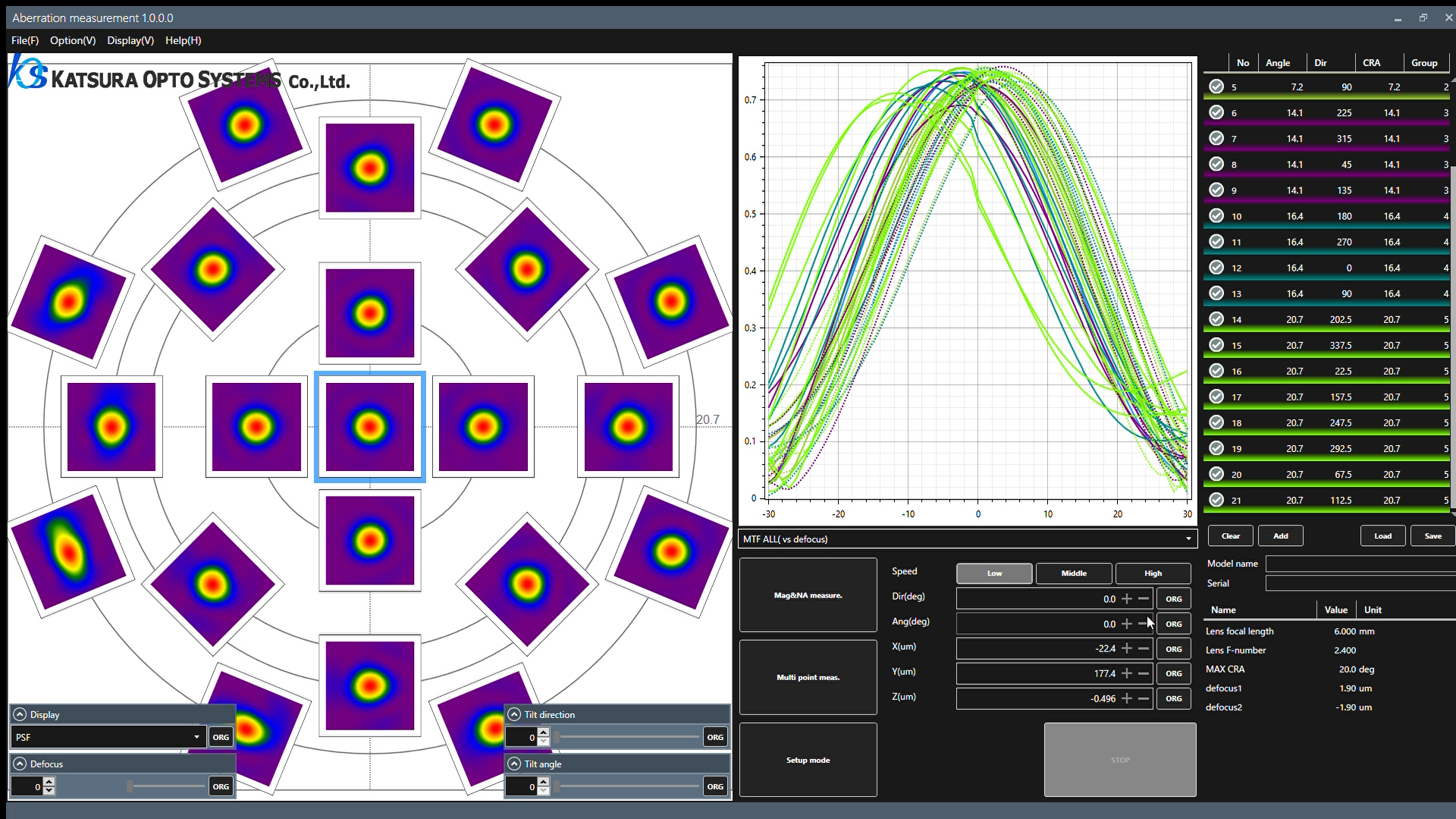
・PSF(点像分布)、MTF(全周波数、全方向、スルーフォーカス)、ゼルニケ
級数等多くの測定が可能です。
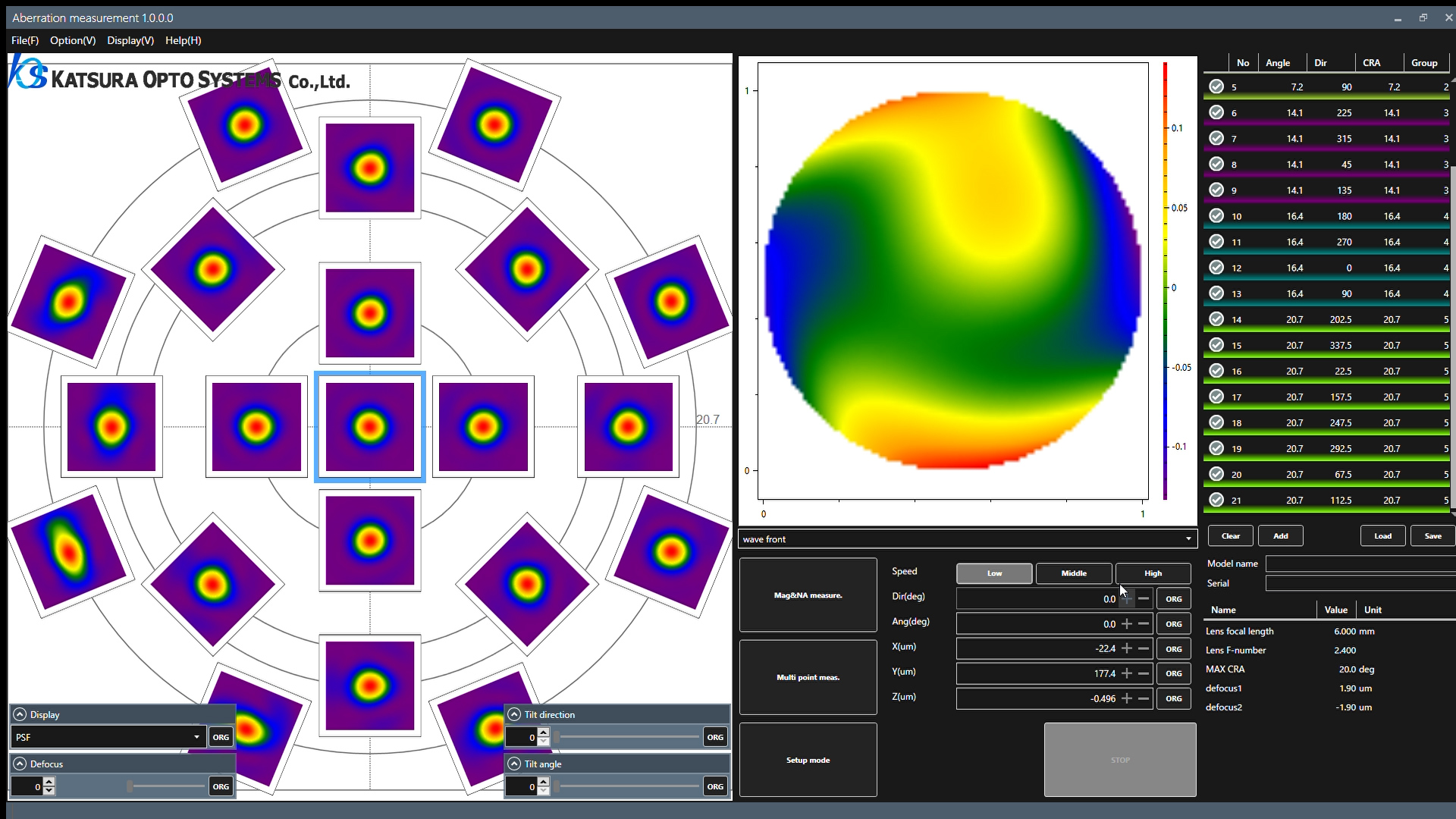
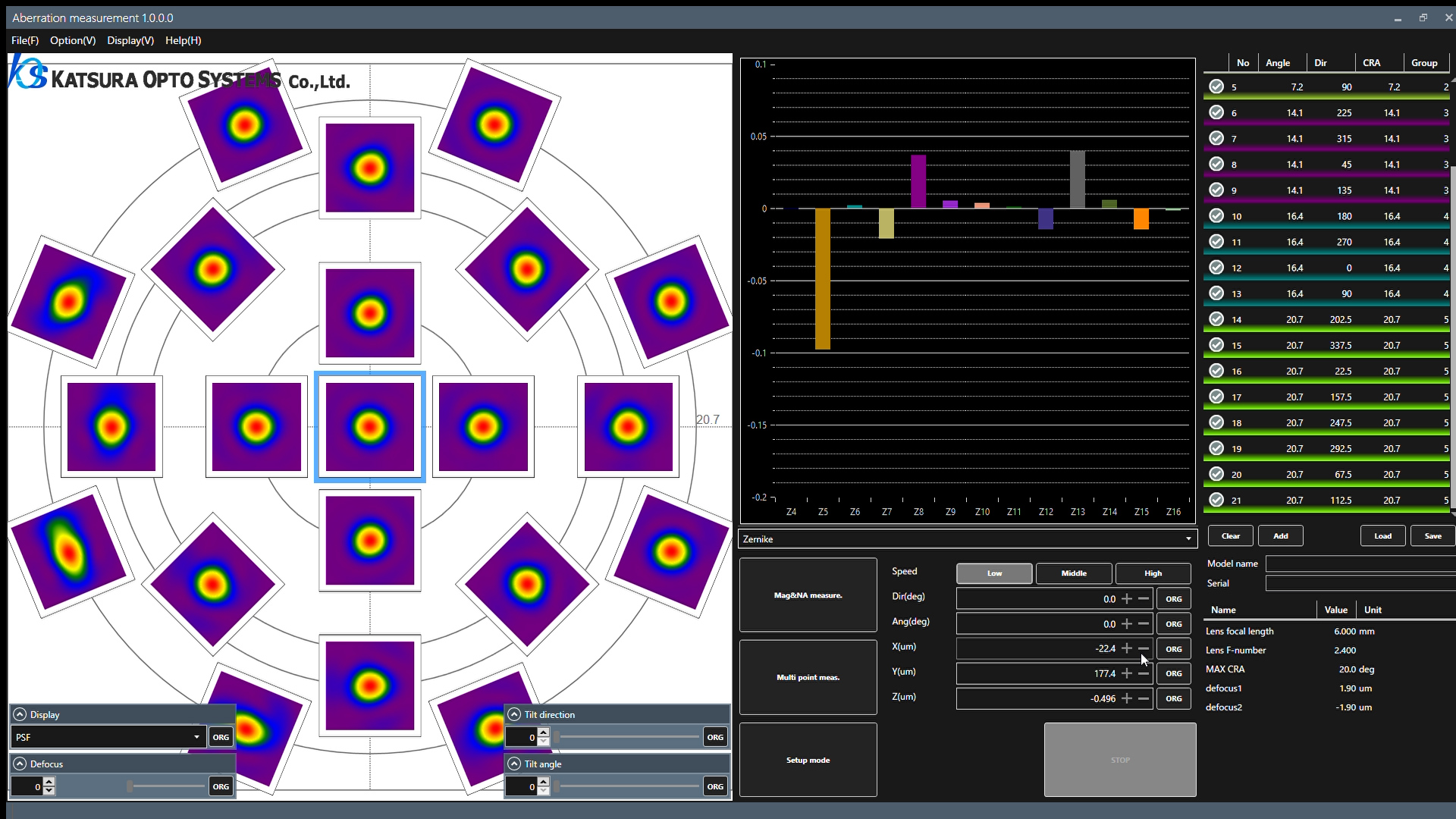
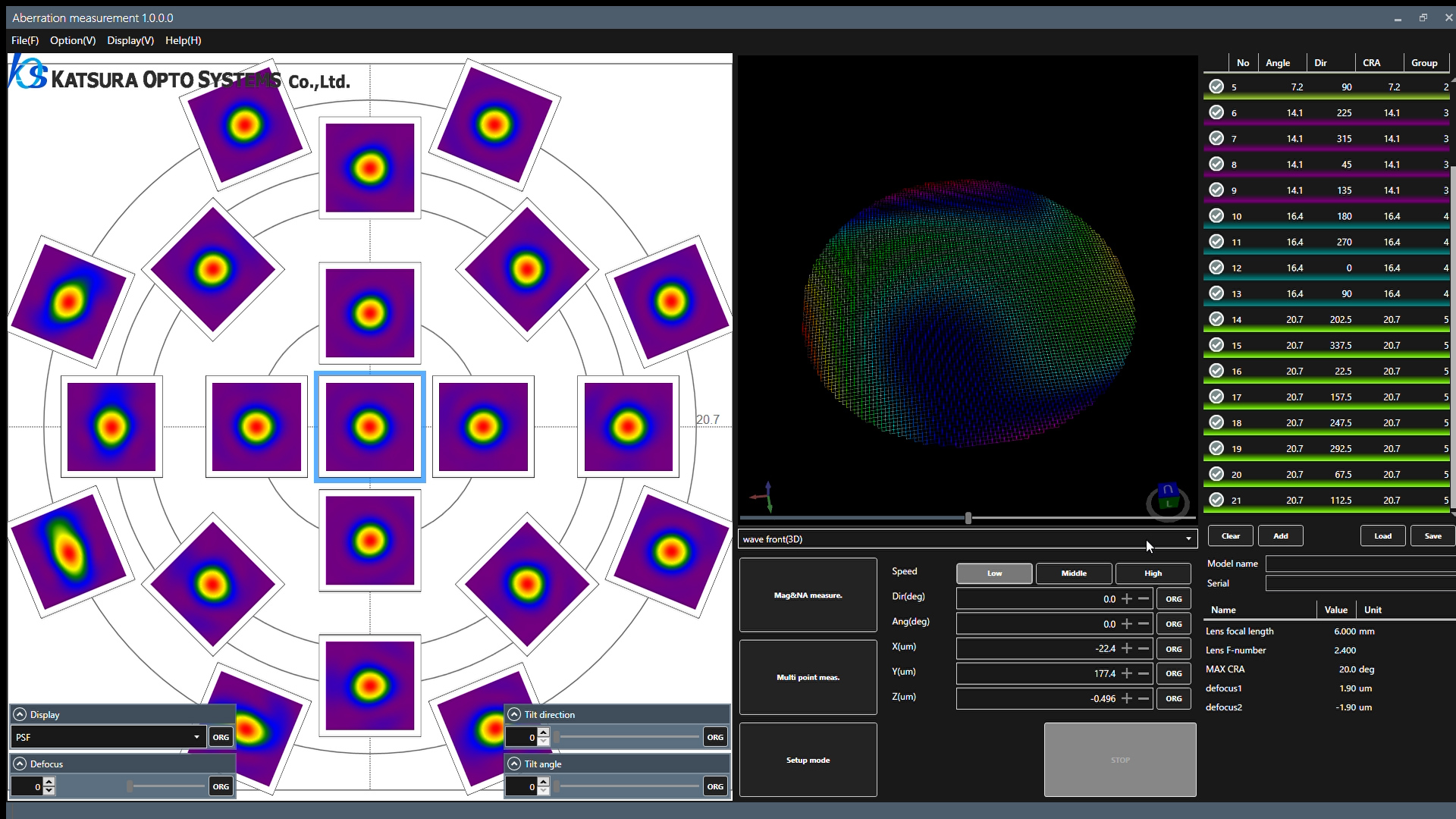
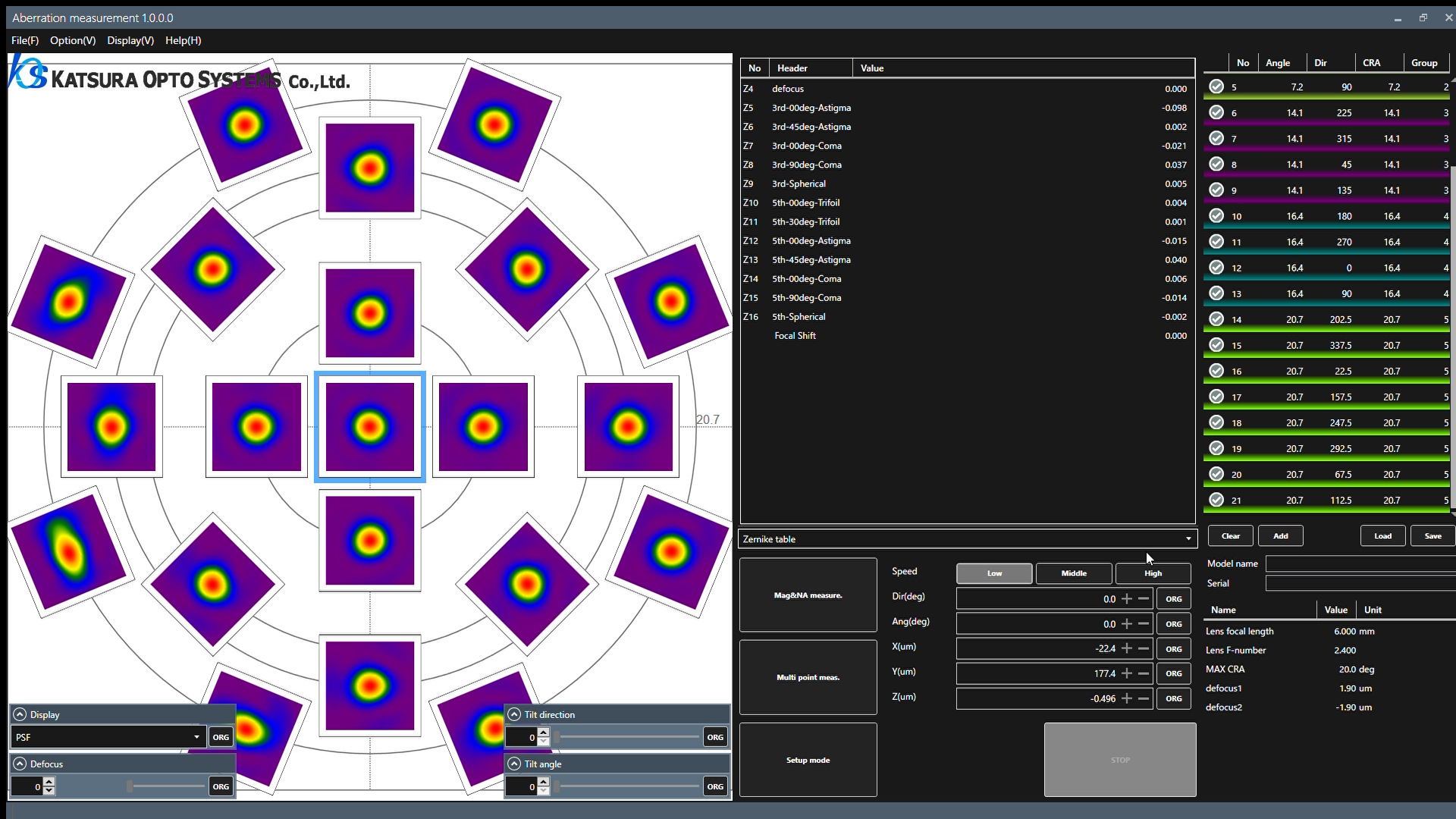
ご興味おありでしたら下記からお問い合わせください。
本製品は半導体レーザーを搭載した光学オートコリメータ方式
による非接触角度測定センサです。
装置への組み込みやハンドラ搭載ニーズにも対応するために極
限まで小型化を行いました。

業界でも最小サイズの1機種である当社旧超小型チルトセンサ
(レーザーオートコリメータ)KT-7000シリーズ※1(以下写真)
に対しても25%の容積率という圧倒的に小型化され世界最小サ
イズ※2を実現しました。
※1:KT-7000シリーズ(KT-7060,KT-7030,KT-7015)は現在
販売を終了しております。
※2:レーザーオートコリメータにおいて、2020年10月当社調べ。
本計測センサは画像処理ユニットを付属しており、60fpsの
処理スピードで角度を測定、上位機器へのデータ出力が可能です。
データ用インターフェイスとしてRS-232C、I2Cを、
又DIOも装備し本計測センサ制御やOK/NG出力なども可能です。
PCはもちろんPLCとの接続も考慮されております。
本製品は発売を年末に予定しております。
詳細は下記よりお問い合わせください。
※2020/12/11 製品名称を超小型チルトモニタから超小型チルトセンサに変更いたしました。
スマートフォンに搭載されるカメラモジュールの中で、センサーシフト方式の
OISはアクチュエータがX-Y軸に加えて回転方向にも補正軸を持っているのが特
徴です。
X-Y軸を変位計で、回転軸をオートコリメータで測定する手法もありますが、
測定するターゲットが複雑になるばかりか、システムをくみ上げる観点からする
とあまりシンプルな手法ではありません。
弊社ではX-Y軸の変位に加え、回転方向の測定が可能なセンサーを2020年8月に
販売を開始しました。
なお、Z方向の変位、チルトX、チルトYも同時に測定可能なため6軸同時測定が
可能です。
測定の様子は下記をご覧ください。
ご興味おありでしたら下記からコンタクトいただけますようお願いします。
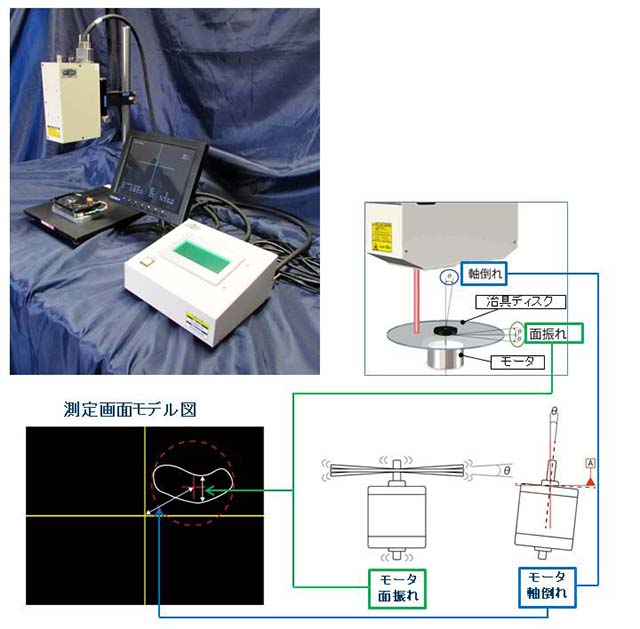
今回はモーター測定用専用ソフトウェアを搭載し、
高速回転物の軸倒れ、面振れの測定が可能な
光学オートコリメータ方式による非接触角度測定センサの
アナログチルトセンサ(オートコリメータ)のご紹介です。
モーターの高速回転時にどの程度の面振れが発生する
かを測定する場合、変位計などを用いて対象物の変位
(高さ)を測定する手法がありますが、
この場合は面の高さを測定することで、面の振れ量の
測定はできますが、軸の倒れがどのように倒れているかは
測定ができません。
カツラオプトのアナログチルトセンサ(オートコリメータ)は対象物の角度を非接触で
高速に測定できるため、面の振れと軸の倒れの2つの要素を同時に
測定する事ができます。
センサは10Kサンプリングに対応しているので高速で回転する
モータなどの挙動を正確に測定することができます。
大量生産中のモーターの品質管理など
モーター関連でお困りの測定テーマなどがおありでしたら
こちらからお問い合わせください。

圧延ローラの隙間は製品の厚さを制御するために非常に重要です。ローラ両端の隙間を
測定、調整することで均一な厚さの製品を作成することができます。
本測定技術は研磨された2つローラの狭い隙間測定を測定する光学センシング方法にな
ります。
研磨されたローラは測定光が複雑に反射しますので精度良く隙間を測定することが非常
に難しい測定物になります。本製品では光源や検出光学系を工夫することで数百um~の
隙間を非接触、高精度測定を可能としました。
近年では蓄電池の需要が高まっておりますが、蓄電池に使われる材料の均一性は製品の
性能のみならず、安全性の確保につながるということで圧延材料の均一性への注目が集
まっています。計測センサはこの様な製品づくりのお役に立てると考えております。
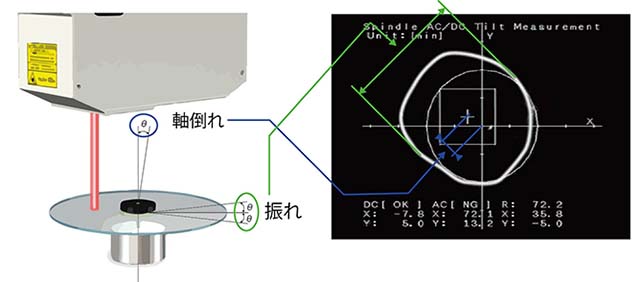
スピンドルモータが回転する際に発生する軸振れ(面振れ)及び回転軸の倒れ角度の測定を行います。
高速アナログセンサを内蔵しています。 モータを実際に使用する回転数で評価が可能です。
モーターなど連続回転物の測定でお困りの際は下記よりお問い合わせください。